About Me

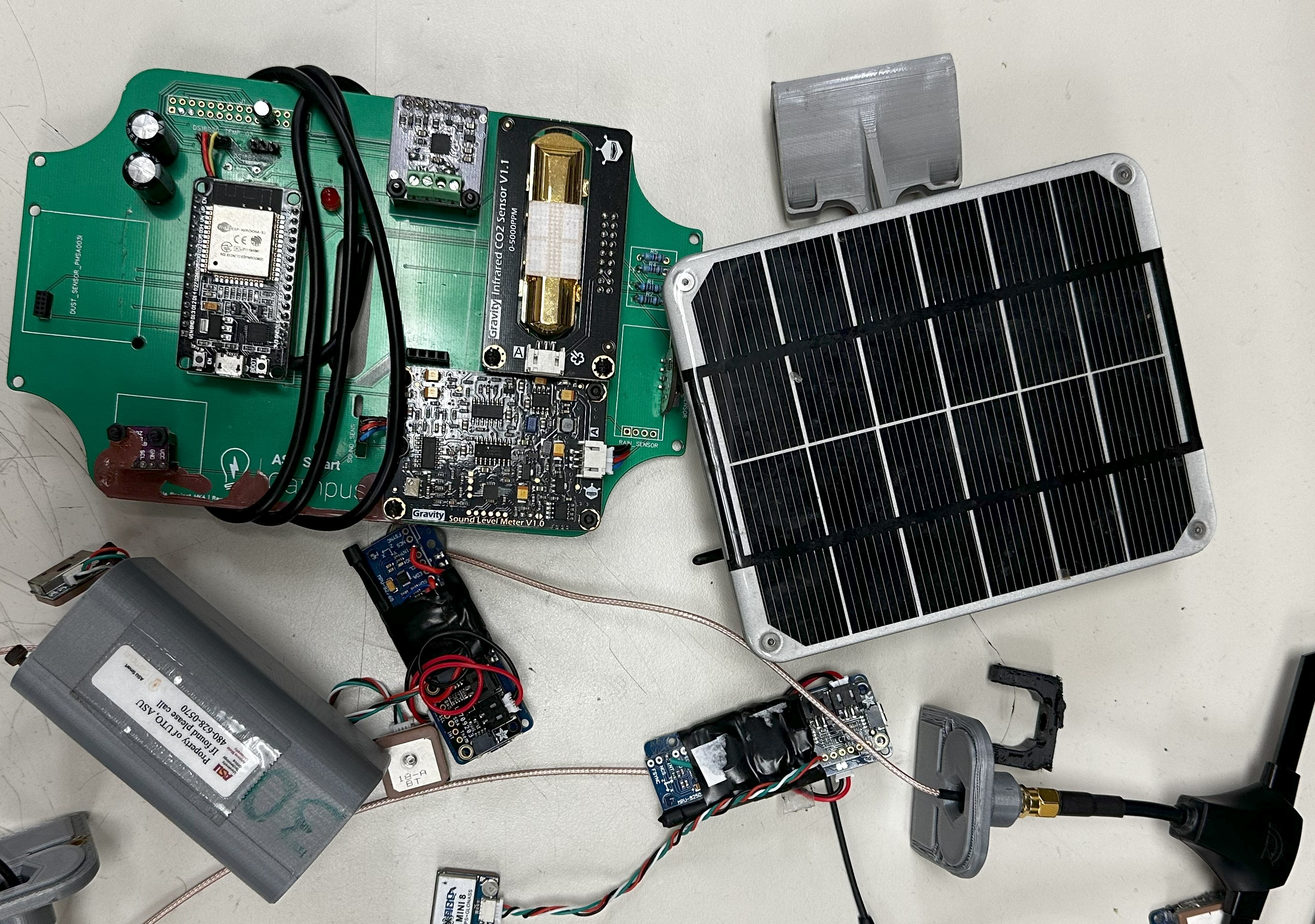
As a graduate student at Arizona State University majoring in Robotics and Autonomous Systems, I have gained valuable experience in designing, manufacturing, and programming through my various job positions.
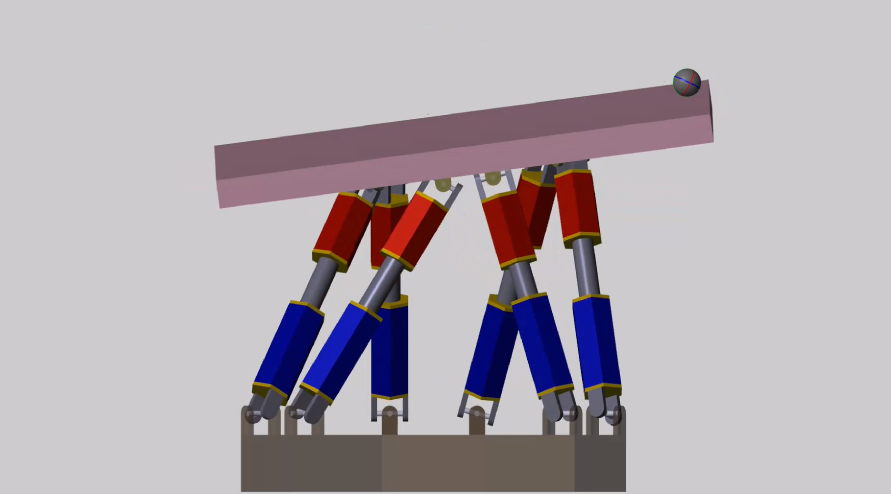
Master of Science, Robotics and Autonomous Systems
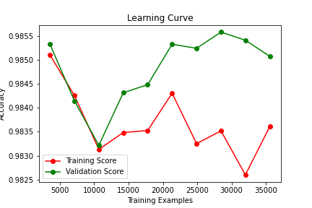
- Relevant Coursework: Reinforcement Learning, Deep Learning, Embedded Machine Learning, Optimal Control, Modelling and Control of Robots
Languages: Python, C++, MATLAB & Simulink, Embedded C, SQL, PowerShell
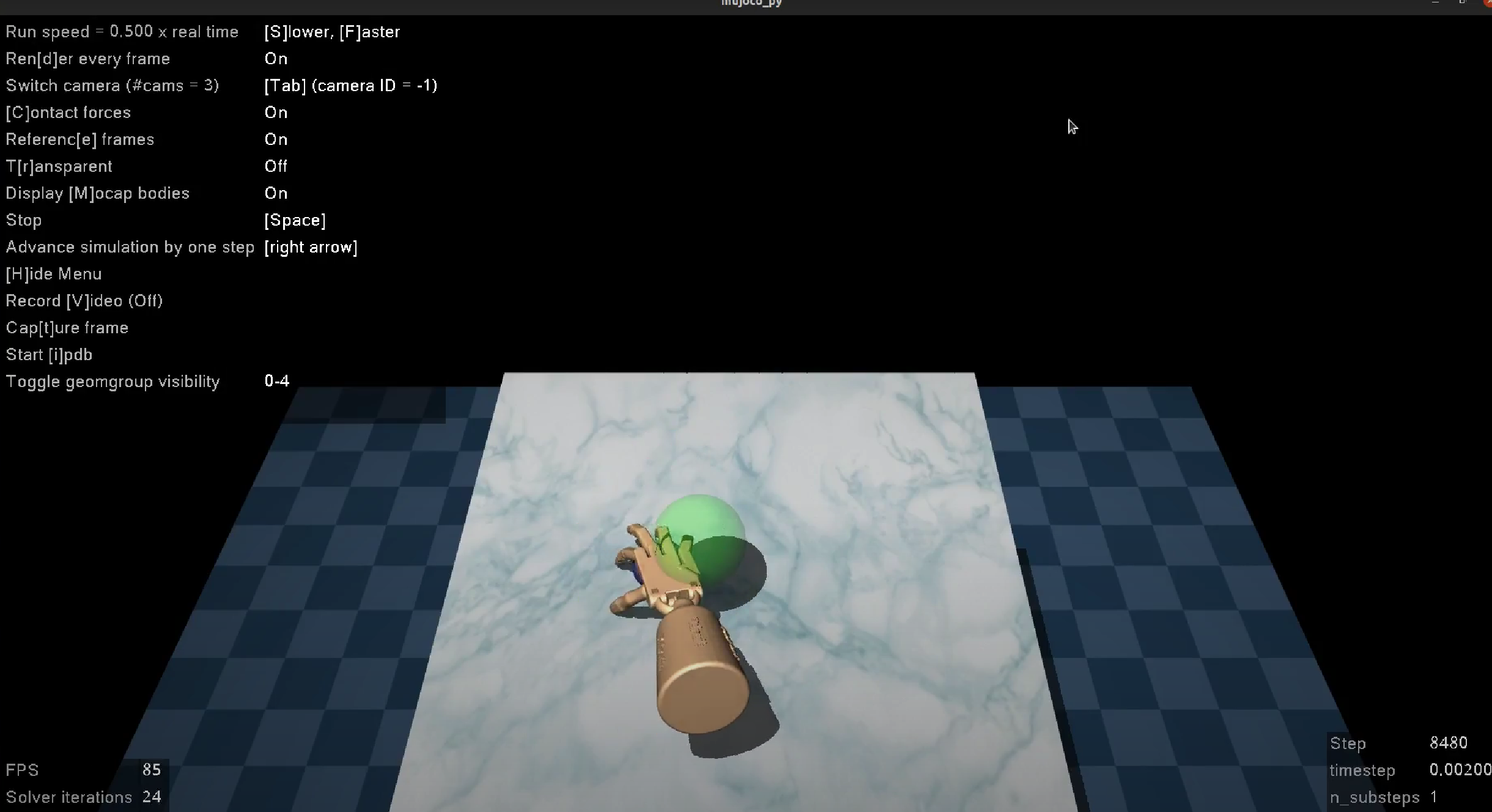
Software: Docker, ROS2, Solidworks, Autodesk Fusion 360, Arduino IDE, Altium, Microsoft Office
Hardware: Semtech SX12xx, NRF BLE, ESP32, SAMD21, Arm Cortex-M microcontrollers, ATmega, Raspberry Pi
Technologies: FreeRTOS, Gazebo, React Native, MQTT, Ubuntu, Tensorflow, Scikit-Learn, PyTorch
Protocols: SPI, I2C, CAN Bus, UART, RF integration (ZigBee, LoRa, Wi-Fi, BLE)
AWS: IoT Core, Lambda, Timestream, DynamoDB, S3 Buckets